LGDXRobot2 簡介
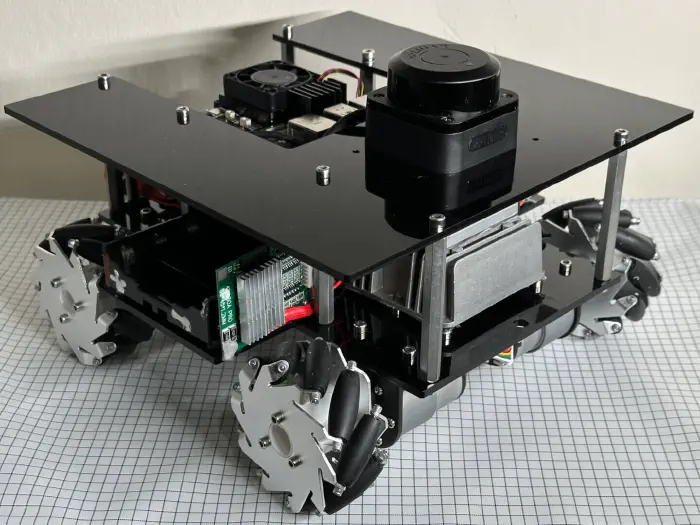
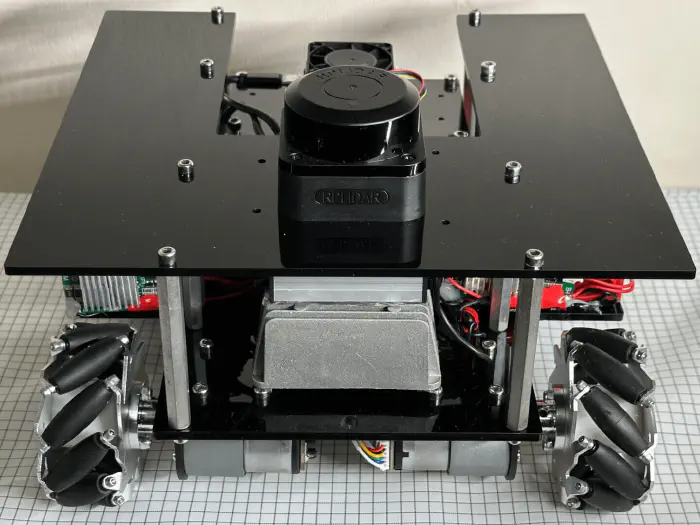
配備多種感應裝置
機身配備激光雷達、九軸 IMU 感應器以及測距輪,專門應付各類導航任務。
各類軟件配套齊全
備有底層韌體及專屬高效測試軟件,同時完美支援 ROS 2 系統。
附設全套操作指南
說明書(僅限英文)涵蓋硬體組裝、軟件安裝及操作,指引清晰詳盡。
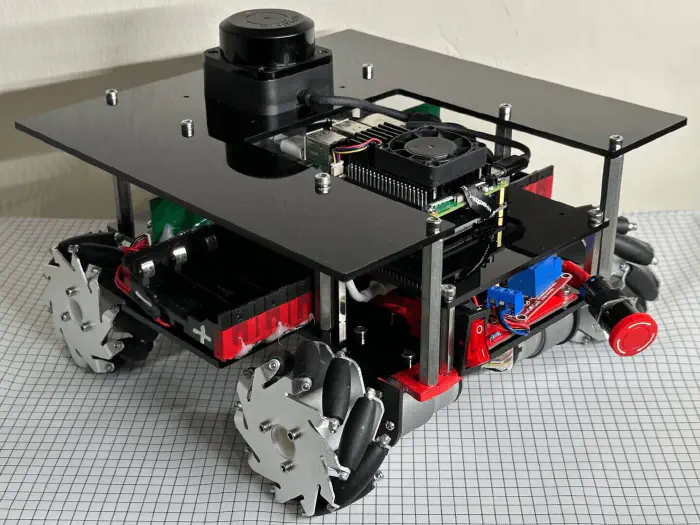
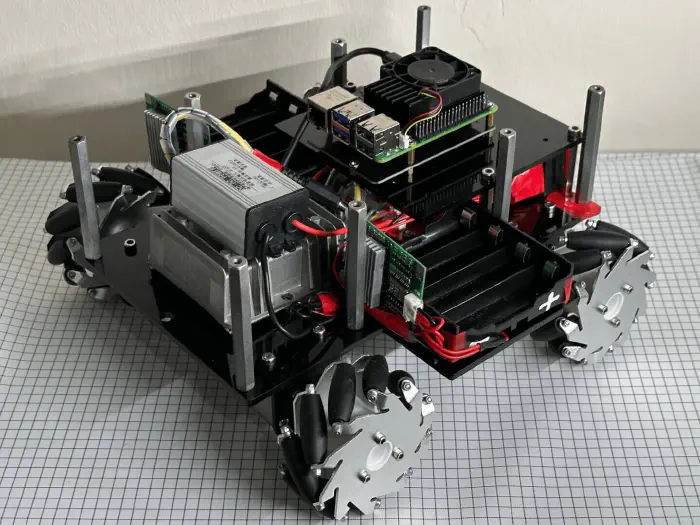
硬件設計全面開源
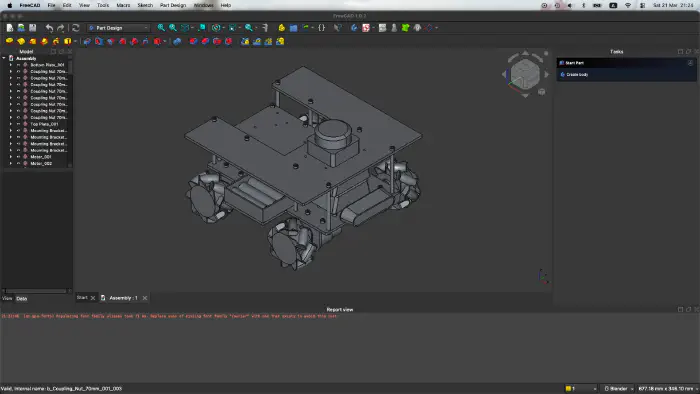
底盤
三層 240×240 mm 激光切割亞加力膠板。
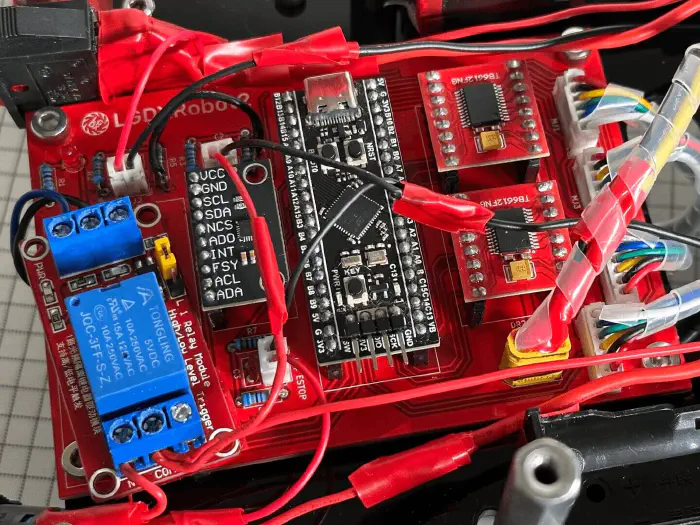
控制板
搭載 BlackPill MCU 與 TB6612FNG 摩打驅動器,支援四組摩打,並具備 PID 控制功能。

專屬高效測試工具
硬件測試
檢查與控制板之通訊狀態,並即時監察硬件運作情況。
PID 微調
獨立設定每組摩打之 PID 參數,並以互動圖表即時顯示調整效果。
磁強計校準
隨時校正磁強計,即時獲取準確數值。
系統擴充靈活多變
遙距監察
經由實時網頁介面,隨時掌握 LGDXRobot2 的運作狀態。
自動化任務管理
委派 LGDXRobot2 執行各式自動化工作,例如物件運送。
盡展 ROS 2 無限可能
RViz
實時呈現 LGDXRobot2 的三維模型、摩打狀態及感應器讀數。
Nav2
執行實時定位與地圖構建 (SLAM),並實現自動導航功能。
Gazebo / Webots
毋須實體 LGDXRobot2,於模擬環境中運行 ROS 2 及 LGDXRobot 雲端管理系統。
快速配置 ROS 2 系統
docker run -d \ --name lgdxrobot2 \ -e PUID=1000 \ -e PGID=1000 \ -p 3000:3000 \ -p 3001:3001 \ yukaitung/lgdxrobot2-desktop:latest